
动物和其它生物间最重要的区别,在于它们拥有经过亿万年漫长的演化过程,形成了优化的器官和组织,能巧妙地通过运动,主动有目的地迅速改变其空间位置。为了生存,动物发展了不同的运动本领,以提高其生命效力和生活质量。动物的运动大体可分为游泳、行走、奔跑、跳跃、爬行、飞行等类型。无论哪种类型的运动,动物既要向前行进,又须适应地心吸力的作用,以维持身体的平衡。在有些情况下,尚须发展附着的能力,例如壁虎在竖立的墙壁上行走。
这里将漫谈动物的运动,及对仿生力学的—些启示。思考这一话题,至少可对以下几方面有益:
(1)利用动物运动的力学机理,为民用或军用的目的,考虑如何改进现有的机械设备和工具,或设计制造新型的仿生高效机械设备和工具。
(2)模仿动物行走、奔跑、跳跃、游泳、飞行、爬行的特点,设计、制造相应有不同特色和应用范围的智能机器人(分别可称为智能行走器、智能机器鱼、智能潜行器、智能爬行器、智能飞行器等),既可在地球上某些特殊环境下使用,以达到特定的目的;又可以为到月球、火星等别的星体上探测、研究时使用。
(3)在竞技体育运动上,根据动物行走、奔跑、跳跃、游泳的特点,吸取其奥秘,提高运动能力和水平,以做到“更高、更快、更强”。
一、游 泳
在水中生活的动物种类多、数量大。现在普遍认为,生命是起源于水中的。水生动物适应水中的环境,其运动形式以游泳为主。水是水生动物运动的媒质,其质量比空气重得多。水生动物要受到水的浮力,其在水中的运动阻力亦要比在空气中大。已进化了几亿年的水生动物,其游泳的方式是多样化的,粗略可分为摆动法、划动法、水翼法、喷射法等。
摆动法,是指鱼利用鳍的波浪式摆动来游泳。多数鱼类有较大的尾鳍,以尾鳍摆动产生向前的推力。如体长约18 cm的鳟鱼摆动尾鳍2次,可从静止状态达到平均游泳速度1.33 m/s 。但也有的尾鳍很小,体形细长、有易弯曲的脊椎骨,如鳗鱼在游泳时身体前部保持直而不弯,后部则左右弯曲摆动。还有很多鱼类也靠摆动背鳍、胸鳍和腹鳍来游泳;当要提高速度时,便把胸鳍贴着身体,用尾鳍摆动来辅助背鳍和腹鳍的运动。
划动法,是指动物利用胸鳍、腿、鞭毛或纤毛划水游泳。蛙的幼体蝌蚪是靠尾部的摆动游泳的,长成蛙后便依靠后肢的划动游泳了。龙虱、水龟虫等鞘翅类昆虫和划蝽、仰泳蝽、田鳌等半翅类昆虫,其身体不能弯曲,靠扁形的后腿划游。衣滴虫用两根鞭毛划水(图1);草履虫是长着纤毛的细胞原生动物,纤毛长约10μm,相距约2μm,像是—艘由5000具浆划动的潜艇。在水面游泳的鼓虫,后腿划动每秒钟达50—60次,可前进达100 cm,而且能分泌降低水表面张力的油类,故行动迅速。鸟类中有游禽,包括鸭、鹅、鸳鸯等靠腿的划动游泳,其趾间有蹼,当腿向后伸时蹼就展开,以增加对水的推力;而收腿时,蹼又褶缩,以减少对水的阻力。
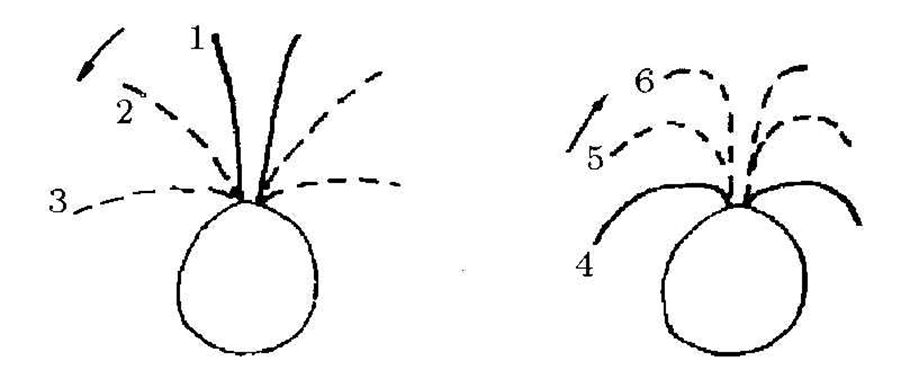
(a)衣滴虫用两根鞭毛划水(虚线与数字表明鞭毛的位置,箭头表明移动的方向)

(b) 甲虫后肢向后滑动时游泳毛张开,向前回复时毛丛闭合。
图1 水生昆虫划动法的游泳
水翼法,是指动物使用其流线型运动器官游泳。以水翼法游泳的,多是体形较大的水生动物,如企鹅、海豚、鲸鱼、海龟、金枪鱼等(图2为海豚的游泳)。它们除了有流线型的体型外,还有流线型的运动器官。试验表明,体长1.9 m的海豚游泳速度可达21.0 m/s 。
图2 海豚的游泳方式
喷射法,是指动物用其器官喷水以产生推力游泳。乌賊与章鱼的呼吸鳃位于套腔中,在头下方后端的腹面有—漏斗状构造和裂口。水可通达裂口进入套腔以供呼吸;套腔肌肉又可收缩,将水迅速挤出,以产生推力(图3)。体长0.2 m的章鱼,由静止状态收缩—次,在水中推进的速度可达2.1 m/s 。还有扇贝,利用闭壳肌舒展收缩来开合两壳,将水从套膜腔挤出去而实现游泳。
(a)章鱼
(b)水母
图3 喷射法的游泳
工程技术专家希望通过对水生动物游泳力学原理的了解,获得启示,以改进现有民用或军用船舰,设计制造新型高效船舰,设计制造智能机器鱼、潜行机器人。目前人们对鱼类游泳的研究与模仿均还很不够,例如船用螺旋桨的流体推进效率还未超过40%,而鱼游的相应效率可达80%以上。鱼游的高机动性、稳定性,低噪声等指标,更为潜艇所望尘莫及。
美国和日本等国家都在大力进行鱼类游动推进机制的研究,研制智能机器鱼(图4)。研制机器鱼,除模拟鱼游动的局部功能外,其主要应用目的是军事侦察、海洋考察、寻找污染源头等用途。

图4 智能机器鱼
在竞技体育运动方面,也希望借鉴、模仿水生动物的游泳,以提高运动能力和水平,夺取更多的金牌,为国争光。据了解,我国这方面的研究和应用有很成功的例子:
2001年在世界蹼泳10个项目的比赛中,俄罗斯队夺得8枚金牌,中国队仅获1枚金牌,远远落后于俄。为改变落后的情况,武汉体育学院等单位在北京大学力学系陈耀松教授的指导和帮助下,对蹼泳的水动力学进行了研究,研制了蹼泳板运动仿真模拟设备,一方面进行蹼泳板的非定常数值模拟,另一方面参考数值模拟结果,在循环水槽中对不同类型的蹼泳板,进行了大量的测试实验。依据这些结果,在蹼泳板的选材、设计和制作上,针对不同运动员的身体特点,采取不同的措施,对运动技术不断完善,使运动水平有了喜人的突破。在2002年9月举行的第11届蹼泳世界锦标赛上,中国队打破了1项世界纪录,夺得13枚金牌和8枚银牌,仅用了l年时间就战胜了俄罗斯队。
二、飞 行
人类自古以来就幻想模仿鸟在空中飞行,制造由人工支配的翼,冒险地进行飞行实验。屈原在《离骚》诗中曾描述了空中飞行,想象自己像鸟一样展翅飞翔,又期望驾云雾腾空。达·芬奇自30岁起用了20余年时间,认真研究鸟类的飞行,完成了《论鸟的飞行》研究手稿,论述了鸟的飞行原理。美国的莱特兄弟仔细观察和分析鸽子的飞行,于1903年12月17日,成功地进行了人类第一架有动力、可操纵的载人飞机的飞行试验。以后的100年,经历了第一次和第二次世界大战,飞机得到了飞快的发展,并已向太空延伸,进入到航天时代。
动物界能飞行得最好的是鸟类和昆虫。当然也有例外,哺乳动物的蝙蝠,也是善于飞行的。航空100年来,人对鸟类作了不少研究和模仿,制造了各类定翼飞行器和旋翼飞行器,但实际上对鸟类和昆虫飞行原理的了解均还较浮浅,尤其是对昆虫研究和模仿得还相当少。
昆虫是动物界种类最多的类群,现已定名的昆虫已达七、八十万种,还有数倍于此的昆虫尚未能鉴定、命名。昆虫主要在陆地生活,分布很广,对环境的适应性很强,这主要是因为它们能够飞行。昆虫的翅与鸟类的翅不同,它们不是由前肢演化而来,而是由体节的背板向两侧扩展变成的。昆虫的翅生长在胸部。除蚊、蝇等双翅类的昆虫外,昆虫—般都有两对翅,生在中胸和后胸,分别称为前翅和后翅。昆虫翅基部都有小骨片和胸部相连(图5),这为翅具备各种活动能力创造了条件,也是翅脉起始的地方。有很多昆虫在停止时,把翅叠起来贴在背部,起飞时马上将翅展开,扑击飞行,如甲虫、椿象等。也有不能叠翅的昆虫,如蜻蜓、蜉蝣等的翅只能平伸,不能折叠。
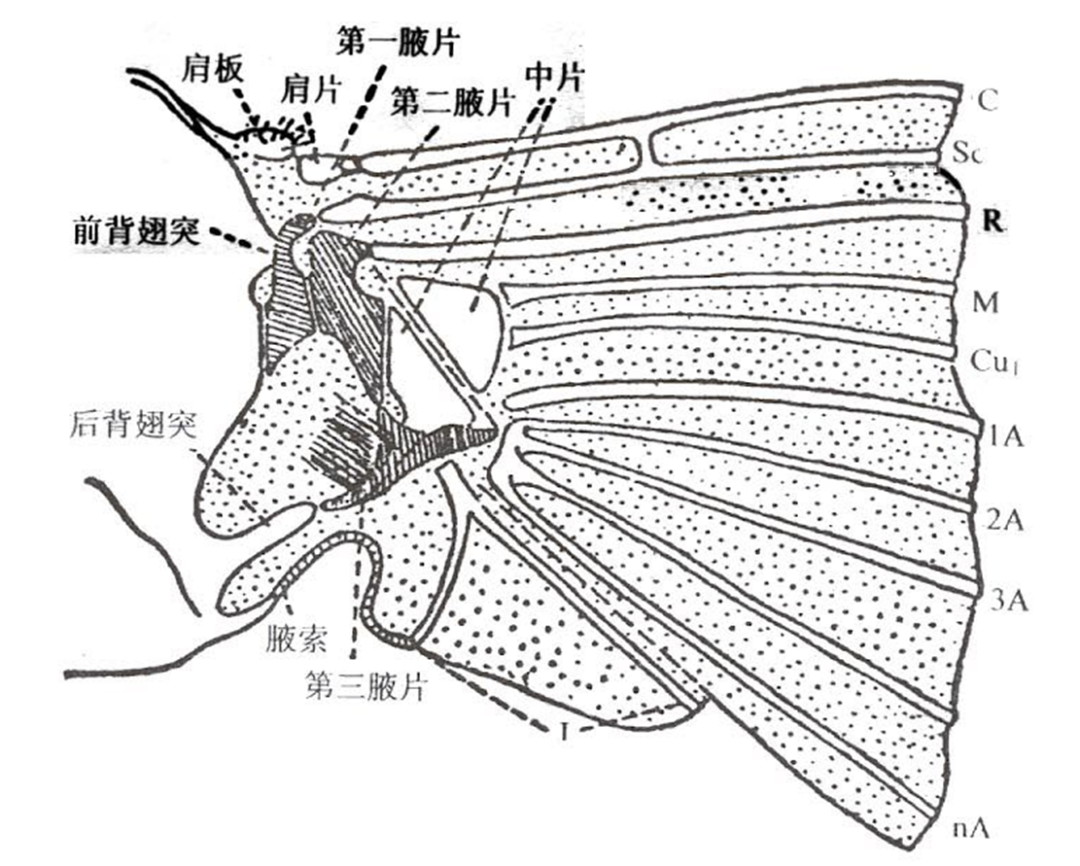
图5 昆虫翅基部的关节构造:含有数种骨片,并与胸背的翅突相连;翅右大部省略,仅显示不同翅脉的排列;C 前缘脉,Sc 亚前缘脉,R 径脉,M 中脉,Cu 肘脉,A 臀脉,J 轭脉
昆虫飞行时,翅的运动包括上下拍击和前后倾折两种基本动作。翅的上下拍击,主要依靠背腹肌和背纵肌的交替收缩所造成(图6)。与翅基相连的前上侧肌、后上侧肌的交替收缩,分别拉动翅基的前上侧片和后上侧片,使翅面作前后倾斜活动。翅下拍时,其前缘向下方切入空气;翅上举时,其前缘向上方切入空气。这样,翅上下拍击一次,翅便沿自身的纵轴扭动一次。昆虫不前进而拍动翅膀时,翅尖成“8”字运动;前进拍动翅膀时,翅尖便造成—系列的开环运动(图7)。


图6 胸部肌肉交替收缩造成翅的上下拍动:(a)背腹肌收缩,翅向上举;(b)肌肉放松,翅放平;(c)背纵肌收缩,背板上拱,翅下拍;(d) 蜻蜓飞行时翅膀

图7 昆虫飞行时翅尖的移动路线(a)身体不动时翅尖的移动路线(b)飞行时翅尖的移动路线
总的来讲,昆虫的飞行是翅的拍击造成的。翅的拍击要有足够的频率和幅度,翅拍击造成的气流所产生的空气动力,可分成向前的推力,促成虫体前进,和向上的升力,以抵消虫体的重力,使虫体能漂浮在空气中。翅的拍击和转动,将空气推向后方和下方,使昆虫能在空中漂浮前进。有些昆虫能改变翅拍击的斜度、幅度或频率,以便在飞行中转弯、倒退或停在空中。
昆虫的体形大小对飞行活动很有影响。蚜小蜂是—种体形微小的昆虫,翅长仅0.5 mm。用高速摄影可知,其翅振频率为240次/秒。蚜小蜂飞行时,其左右双翅在每次上升到顶时,拍合后再行分离,并以翅前沿最早分离(图8)。蚜小蜂这种振翅方式,在翅的周围产生了非定常旋涡,其力量足以举起蚜小蜂的体重。据了解,近年来国内外许多学者在对昆虫的飞行机理进行研究,较细致地研究昆虫翅膀拍动过程的空气动力学原理。现也已有人在研究蚜小蜂振翅所产生非定常涡的机理,但至今尚还未能完全揭示其飞行奥秘。
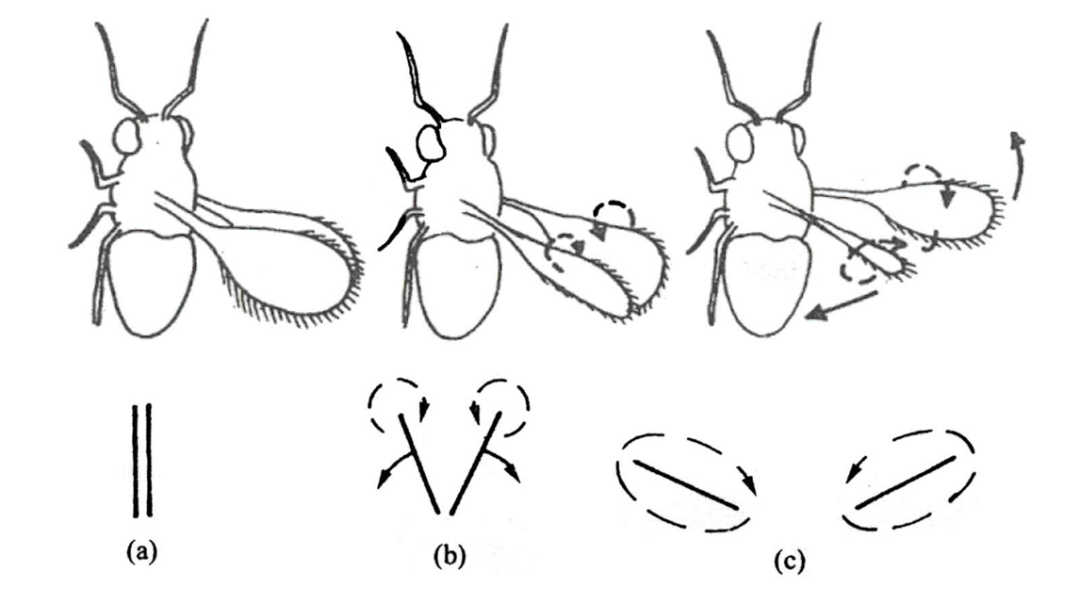
图8 蚜小蜂飞行时翅的动作:上排从左到右表示前翅与后翅分开时使空气产生涡旋;下排是二翅分开(黑箭头)活动所产生的空气涡旋(虚线)。
蝙蝠是哺乳动物,它的前肢演化成为皮上有毛的翅膀。在滑翔时,它通过调节超前缘的迎角,降低高度而前进。在振翅飞行时,它依靠翅的上下扑击克服曳力而前进、上升。蝙蝠有机动性很强的慢飞动作(图9),对其在空中捕食飞虫十分有利。对于蝙蝠,人们对其飞行原理的研究也还不够。

图9 蝙蝠飞行姿态
鸟类是人类最早注视并模仿的飞行对象,鸟类也是振翅飞行的,鸟翅是由脊椎动物的前肢演化而成的,鸟翅长着初级飞羽和次级飞羽,组成了鸟类的主要飞行器官。鸟类在飞行时,可变动双翅的面积和形状,及与躯体的相对位置,促成飞行时的机动性、以及起飞或停歇。可是人类航空100年模仿的结果,却只是各类定翼飞行器和旋翼飞行器,其飞行原理仍与鸟类的飞行原理相去甚远。
国外很重视昆虫飞行机理的研究,20世纪90年代开始也在大力研究各类智能飞行器(图10)。

图10 美国全球鹰无人驾驶侦察机(RQ-4)
通过以上对动物飞行情况的讨论,容易看出需要挑选几种飞行本领卓越、用现行空气动力学知识尚解释不清的昆虫(如蚜小蜂)、鸟类以及蝙蝠,进行深入地观察、研究和实验,探寻其飞行机理的奥秘,以供改善现有的飞行器、设计制造新型仿生高效飞行器、设计制造智能微型飞行器时参考(图11)。
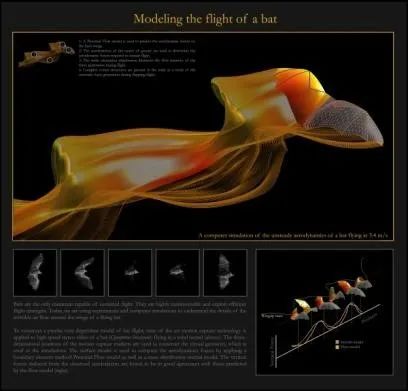
图11 布朗大学的工程师肯尼斯·布劳尔利用激光和先进的多镜头动态跟踪系统记录下了果蝠在飞行时其翅膀与翅膀周围的空气变化情况
三、行走、跳跃与爬行
人和鸟类都以双腿行走,行走时其体重由双腿交替负担。用四肢行走的动物,当举起一腿时,重心便落在其余三腿所组成的三角形之内。昆虫是六足动物,有很多种类的昆虫善于行走,如蜚蠊、瓢虫、步行虫、椿象等。美洲蜚蠊在25℃温度下,ls最快可行走130 cm 。昆虫行走时,一般均以—边的前足、后足和另一边的中足为—组,使身体重心处于另一组由另三足形成的三角形中,前进时二组交替进行。
很多昆虫善于跳跃,有些鸟类和兽类也能跳跃。袋鼠、袋猴以跳跃代步,较为特殊。蝗虫、蚱蜢、蟋蟀、跳蚤等昆虫的后足特别发达,当其后足的腿节和腓节由褶折状态突然伸直时,就产生了跳跃的动作(图12)。一只重3 g的蝗虫双腿能产生初速为3.4 m/s的力量跳离地面,跳跃的角度常为60度;一只5龄的蝗虫可跳30 cm高,70 cm远。跳蚤跳跃最高15 cm,最远30 cm。如果将几种动物的跳跃能力和其身体长度作比较,青蛙能跳到自身长度的12倍,跳蚤可达200倍,而体形较大的袋鼠却只有5倍。

图12 蚤起跳时后肢的动作
在人类举行的运动会中,跑和跳是传统的田径比赛项目。人跳高时的四肢动作与动物颇有相似之处,但起跳前有一助跑过程,以获得重心上升的冲力,成绩优良的运动员可越过2 m高的横杆。跳运是利用一腿的力量,将身体重心向上、向前推进。优秀运动员可跳7 m以上。人跳远时,身体在空中移动的轨迹与青蛙的跳跃颇相似,都须有一定的高度使身体离地面的时间较长。若重心提高的时间达1 s时,距离将可达9 m之远。是否可设想,将跳跃时,一跳离跳点较远的动物(如青蛙)的高速摄影图像,用计算机与某竞技运动员的跳远动作进行比较分析,以调整其动作,提高其运动成绩。
在爬行类动物中,首先容易想到的是蛇。蛇的最大特点是脊椎数目多,常达160颗以上,最多的可到400颗以上。蛇是依靠身体不同部分的弯曲,获得支撑物反作用所产生的力量前进的。蛇可以在十分狭窄的地方爬行(如进入鼠穴捕食),其身体一部分弯曲,形成的波浪向后移动,使整个身体得以前进。蛇爬行的许多活动自如的特点,是由于其躯体演化成长形、而无四肢所造成的。由此我们不妨可以设想,研究和模仿蛇的动作,设计制造出智能运动蛇(图13),以达到某种特殊应用的目的。
图13 机器蛇
和蛇相反的是多足爬行动物,如蜈蚣、马陆、蚰蜒等。它们的身体分为头和躯干两部分,躯干由许多具有步足的体节组成。体节最少为11节,最多的上百节。蜈蚣的足活动时,每足向后一推的时间比向前一扒的时间长,而且足推动时使驱干产生一个波动,从而向前进。腹足类软体动物,如蜗牛、螺蛳、蛞喻等,是用块状的足,附在固体上爬行。可通过玻璃板来观察蜗牛的爬行,若在足上预先滴一小滴墨水,可清楚看到蜗牛足的运动是由肌肉伸长和缩短的波形活动形成的。这些软体动物爬行都不快,如蜗牛的爬行速度只约为2.5 mm/s(图14)。

图14 蜗牛爬行
如果将昆虫作为超级英雄,蟑螂也许是其中令人惊奇的一个。有些蟑螂每秒钟的行走距离达到其体长的50倍(很少有人能在一秒钟内走过自身体长的5至6倍),也有一些蟑螂在逃逸的时候,遇到高低不平的表面和比自身要高的障碍物时不必降低速度。科学家曾经制造出6条腿的机器人,主要是因为这种结构具有很好的稳定性,但是其移动速度从来未达到蟑螂的速度。蟑螂的逃逸技能非比寻常。其体型使其速度和稳定性达到最大化,能很快地将身体挤进窄缝中。对蟑螂移动方式与技能的详细研究,会为机器人仿生学提供有益的思路。
综上所述,观察与研究动物的运动机理,模仿它们来制造各种有用的工具和设备,提高人类的竞技运动水平,既是很有趣的事情,又是有重要意义的工作,应当引起人们更多的关注。
参考文献
1、钦俊德,动物的运动[M],北京:清华大学出版社,广州:暨南大学出版社,2000
2、童秉纲,鱼类波状游动的推进机制[J],力学与实践,2000,22(3):69—74
3、崔尔杰,生物运动仿生力学与智能微型飞行器[J],力学与实践,2004,26(2):1—8
4、孙茂,昆虫是怎样飞行的[J],力学与实践,2004,26(1):80—83
5、武际可,人类飞起来前后[J],力学与实践,2003,25(6):76—80
6、李艳平、戴念祖,漫话中国古代的飞行[J],力学与实践,2004,26(3):90—92
7、李成智,飞机百年发展与空气动力学[J],力学与实践,2003,25(6):1—13
8、王振东,诗情画意谈力学[M],北京:高等教育出版社,2008
本文作者:王振东




